山東本森智能裝備
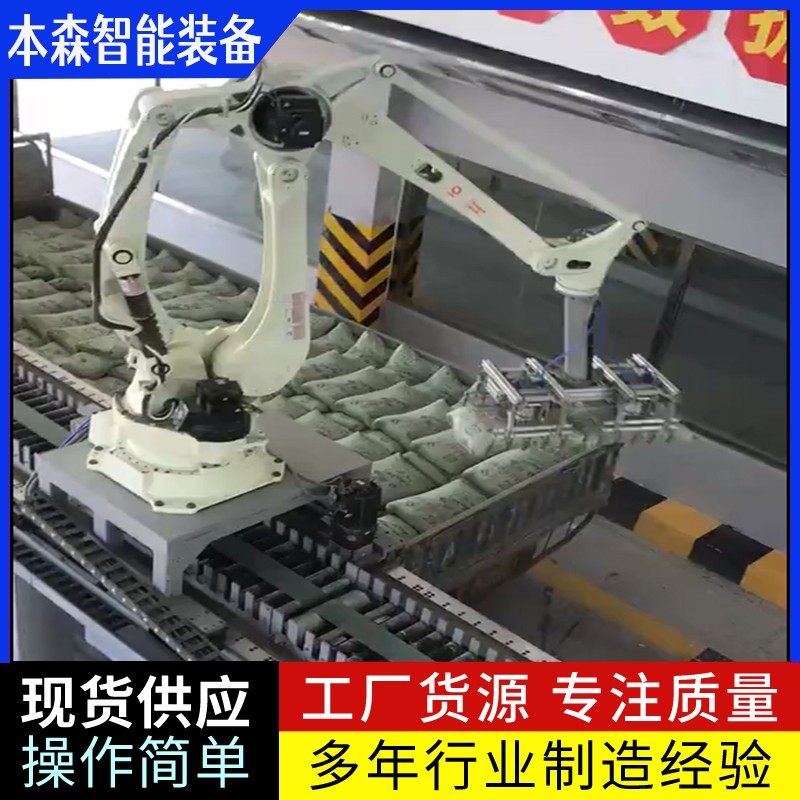
機器人裝車機械臂是融合機械臂技術(shù)、人工智能算法與自動化控制的智能設(shè)備,通過視覺識別系統(tǒng)精準定位貨物,結(jié)合高精度機械臂實現(xiàn)自動抓取、搬運與裝載。其核心優(yōu)勢在于高效、精準、靈活、安全,能夠適應不同形狀、重量貨物的裝載需求,并顯著降低人工成本與勞動強度。
1.機械臂本體
·結(jié)構(gòu)類型:多采用六軸串聯(lián)機械臂,具備高自由度(6個旋轉(zhuǎn)關(guān)節(jié)),可模擬人類手臂的靈活運動,適應復雜裝載場景。
·關(guān)鍵部件:
·基座:提供穩(wěn)定支撐,通常采用高強度材料(如鋼或鋁)制造。
·連桿與關(guān)節(jié):通過旋轉(zhuǎn)關(guān)節(jié)連接,實現(xiàn)多角度運動,部分型號采用輕量化設(shè)計以降低能耗。
·末端執(zhí)行器:根據(jù)貨物類型配備電動夾爪、真空吸盤或力傳感器,實現(xiàn)精準抓取與柔性操作。
2.視覺識別系統(tǒng)
·功能:通過深度攝像頭或激光雷達掃描貨物,識別種類、形狀、重量及位置信息,為機械臂提供精準定位數(shù)據(jù)。
·技術(shù)特點:
·支持毫米級定位精度,確保貨物放置準確性。
·可適應不同光照條件,甚至在無塵車間、低溫冷庫等特殊環(huán)境中穩(wěn)定工作。
3.控制系統(tǒng)
·路徑規(guī)劃:基于SLAM算法(即時定位與地圖構(gòu)建)實時生成最優(yōu)移動路徑,避開障礙物并優(yōu)化多機器人協(xié)同作業(yè)。
·運動控制:結(jié)合逆向運動學與動力學模型,計算關(guān)節(jié)角度與力矩,實現(xiàn)平滑、精準的運動軌跡。
·反饋調(diào)整:通過傳感器監(jiān)測實際運動軌跡,與預設(shè)路徑對比并實時修正,確保裝載穩(wěn)定性。
二、機器人裝車機械臂技術(shù)特點與優(yōu)勢
1.高效率
·連續(xù)作業(yè):24小時不間斷工作,裝載效率較人工提升數(shù)倍。
·快速響應:從識別到裝載完成全程自動化,縮短循環(huán)周期時間。
2.高精度
·定位精度:毫米級誤差控制,確保貨物整齊堆疊,減少運輸損耗。
·重復定位:采用高性能諧波減速機,長期運行中保持精度穩(wěn)定。
3.靈活性
·貨物適應性:可處理箱裝、袋裝、異形件等多種貨物,通過更換末端執(zhí)行器擴展功能。
·場景適應性:支持跨區(qū)域物料轉(zhuǎn)運、產(chǎn)線供料、成品入庫等多場景應用。
4.安全性與可靠性
·環(huán)境耐受:密封設(shè)計適用于粉塵、油污、有害氣體等惡劣環(huán)境。
·動態(tài)補償:在移動平臺(如AGV)上作業(yè)時,通過視覺引導與力控技術(shù)保持操作穩(wěn)定性。
5.成本效益
·降低人力成本:減少人工裝卸需求,緩解勞動力短缺問題。
·減少損耗:精準操作降低貨物破損率,節(jié)省企業(yè)運營成本。
1.物流倉儲
·貨到人揀選:在倉庫中自主完成貨物抓取與分揀,提升倉儲效率。
·跨區(qū)域轉(zhuǎn)運:通過AGV+機械臂復合機器人實現(xiàn)物料在不同工位間的自動搬運。
2.制造業(yè)
·產(chǎn)線供料:為電子、汽車零部件等生產(chǎn)線精準配送物料,適應小批量、多品種生產(chǎn)需求。
·成品裝車:在糧油、家電、食品飲料等行業(yè),實現(xiàn)箱裝或袋裝貨物的自動裝載。
3.特殊環(huán)境作業(yè)
·無塵車間:替代人工進入潔凈環(huán)境,減少污染風險。
·低溫冷庫:在低溫條件下穩(wěn)定作業(yè),保障食品、藥品等冷鏈物流安全。
四、機器人裝車機械臂行業(yè)案例與數(shù)據(jù)支撐
· 飼料行業(yè)應用:某大型飼料企業(yè)引入機械臂裝車系統(tǒng)后,裝載效率提升300%,人工成本降低50%,貨物破損率下降至0.5%以下。
· 化工領(lǐng)域?qū)嵺`:在化肥、食糖等散裝貨物裝載中,機械臂通過真空吸盤實現(xiàn)快速抓取,單日處理量達200噸,較人工提升4倍。
· 電子廠柔性生產(chǎn):復合機器人(AGV+機械臂)在電子產(chǎn)品生產(chǎn)線中,為10個工位同步供料,設(shè)備利用率提升至95%,生產(chǎn)周期縮短20%。
1.智能化升級:結(jié)合5G與AI技術(shù),實現(xiàn)遠程監(jiān)控與自適應決策,提升設(shè)備自主性。
2.多機協(xié)同:通過集群調(diào)度算法優(yōu)化多機器人協(xié)作,提升大規(guī)模裝載場景效率。
3.輕量化與模塊化:采用碳纖維等新材料降低機械臂重量,同時通過模塊化設(shè)計簡化維護與升級流程。